随着近几年交通事故和交通拥堵对传统汽车工业的强烈冲击,同时在计算机技术和互联网技术的迅速发展的加持下,自动驾驶技术成为了各国优先发展的前沿技术。包括传统车企和以谷歌、华为、特斯拉等为代表的的新兴科技巨头都已经发展出了自己的自动驾驶技术和自动驾驶整车等。
图源:汽车电子网
在国家政策和市场的积极引导下,全球的自动驾驶技术已经得到了极大地发展。但是近日来,国内发生的多起具有自动驾驶功能的汽车车祸又一次将自动驾驶技术推上了舆论的风口浪尖。
那么作为目前代表两大主流自动驾驶技术的企业—华为和特斯拉,它们各自都是通过怎样的技术路线实现自动驾驶的呢?它们的技术又都有何利弊呢?
特斯拉:纯视觉方案
同人驾驶汽车的过程类似,自动驾驶系统可以分为三大部分:感知系统、决策系统和执行系统。感知系统通过各种技术手段对驾驶过程中的各种路况信息进行捕获;决策系统通过对感知系统获得的全部信息进行研判做出相应的决策;执行系统将将接收到的决策落实行动。目前不同的自动驾驶技术的主要区别就是在于其感知系统的差异。
像特斯拉、极氪、百度都使用的是纯视觉感知方案,其中特斯拉更是视觉派的坚实拥护者。目前这种投入实际工业应用的自动驾驶的技术路线可以被称为“纯视觉”方案。
感知系统捕获的大量图像视觉信息将通过基于神经网络的计算机视觉识别系统对图像中所含的信息进行分类识别,识别到的有益信息将传递到决策系统来做出决策后来干预车辆的运行状态。为了提高整体驾驶过程中的安全冗余,车辆会在行驶过程中也会同时收集相关的行车信息。

视觉感知方案硬件对比
特斯拉的感知系统通过多种传感器融合,将传感器捕获的信息通过人工智能算法进行分析和解算,后通过车载显示设备将相关的信息呈现给驾驶员。该系统的硬件设备主要包括覆盖车身周围360度视野的8个摄像头,对周围的最远监控距离可达250m。同时为了完善视觉感知系统还安装了12个超声波传感器用来探测障碍物距离。前置的雷达通过冗余波长来保证汽车在极端恶劣条件下的探测能力。
而在以特斯拉为代表的采取“纯视觉”的自动驾驶方案中,图像语义分割(ISS)是其中最重要的一项核心技术。图像语义分割在自动驾驶系统中主要用来进行行车路线和街道的识别和理解,是视觉自动驾驶方案的技术基石。就是将感知系统捕获到的图像按照其不同的含义、属性等进行分类,自动将不同类型的图像加以区分并识别。
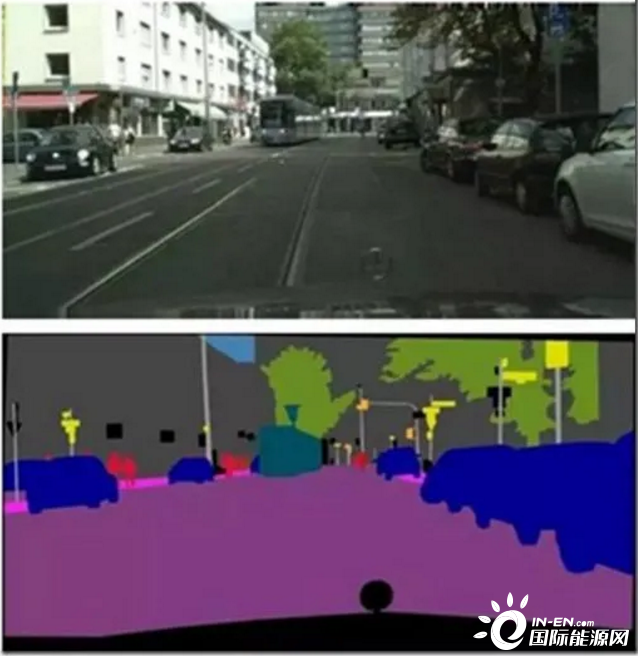
车载摄像头图像语义分割对比
特斯拉目前规模化应用的自动辅助驾驶系统是Tesla Autopilot技术,其应用HydraNets骨干架构将48个不同类型的神经网络在计算过程中共享主干。通过基于Python语言的PyTorth学习框架来进行神经网络的训练,每个摄像头捕获的图像都通过单个神经网络进行训练处理,随后将所有的内容全部整合到骨干神经网络中。其整体的算法循环为:感知系统收集图像数据、车载系统标记数据、训练系统进行网络训练。
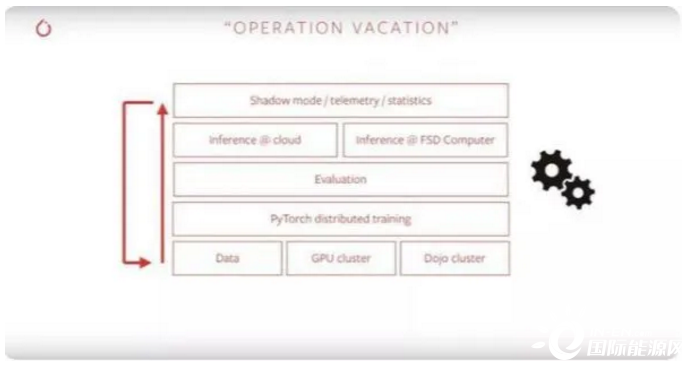
AutoPilot系统工作流程/自动驾驶之家
特斯拉的辅助和自动驾驶系统最大的优势就是其在全球目前巨大的整车保有量,即通过分布于全球的大量行车数据,不断地对驾驶模型进行强化、训练,以期覆盖全部的应用场景和各种复杂工况,从而达到真正意义上的自动驾驶。
华为:视觉算法+激光雷达
类似于人在驾驶过程中,人眼在极端复杂的路况、光线等的作用下,往往容易对行车路线、距离等出现错误判断。“纯视觉”的自动驾驶方案也容易发生类似的情况,计算机视觉算法目前虽然已经得到了极大地发展,但是其对于边界情况的处理能力仍然比较有限。正是因为视觉算法目前的局限性,越来越多的提供汽车自动驾驶方案解决方案的厂商都选择了“视觉算法+激光雷达”的解决方案。
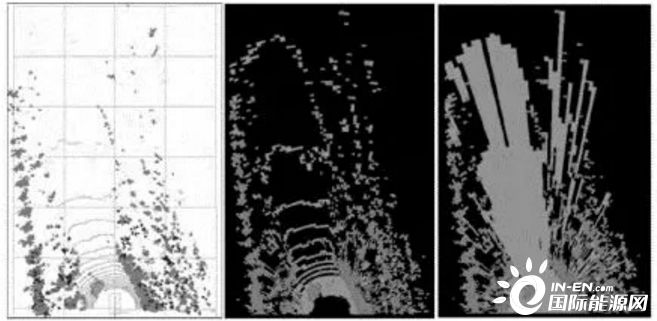
图片激光雷达的环境感知点图、栅格图和可行驶区域检测图 图源:黄武陵.激光雷达在无人驾驶环境感知中的应用
而目前阻碍激光雷达大规模应用于自动驾驶汽车系统中的主要原因就是一个字“贵”。据悉市场上L4级别无人驾驶车辆所搭载的64线激光雷达的价格可达8-10万美元一台,这也是特斯拉公司CEO马斯克对激光雷达嗤之以鼻的原因。

激光雷达方案硬件对比
华为就是采用“视觉算法+激光雷达”自动驾驶方案的代表企业。华为在其自动驾驶系统中搭载了100线车规级的激光雷达,同时也安装了微波雷达、RYYB传感器和视觉分析系统来达到更好的行车环境识别效果。同时华为已经将自研的激光雷达成本控制在了200美元之内,还计划在两年之内将成本降低到100美元之内。其在车载激光雷达的成本和系统环境感知质量之中找到了平衡点,同时车道级的导航系统也会使其自动驾驶系统的安全性再上一个台阶。
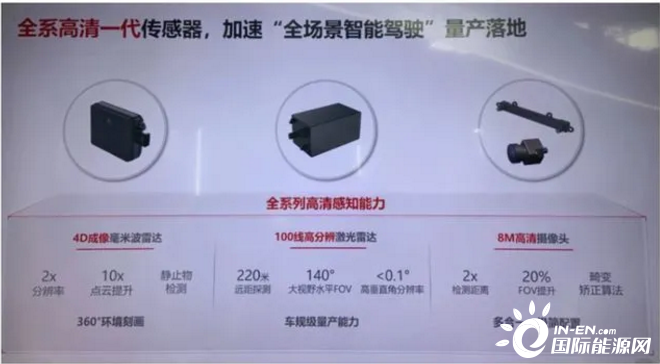
国产自动驾驶传感器系列产品/EET China
结语:
以华为和特斯拉为代表的自动驾驶技术方案对比,其实就是在现有的技术条件下,自动驾驶功能的完成度和系统经济性之间的比拼。
以特斯拉为代表的的纯视觉派为控制自动驾驶系统成本,只使用计算机视觉技术以期实现L4以上级别的自动驾驶。而华为则利用自身在通信技术方面的巨大优势和深厚积淀,将车载激光雷达变成了“白菜价”,其打造的“视觉算法+激光雷达”的自动驾驶技术相对来说有着更高的安全冗余。
在今后的汽车自动驾驶技术上,各个企业又将走向何种技术方向呢?在何时才能实现真正意义上的自动驾驶呢?我们也将拭目以待。