收藏本页
收藏本页
 设为主页
设为主页
 随便看看
随便看看
 免费会员(企业)
免费会员(企业) 15766085586
15766085586
 联系人:张红艳
联系人:张红艳 电话:
电话: 手机:15766085586
手机:15766085586 经营模式:制造商
经营模式:制造商 所在地区:广东/深圳市
所在地区:广东/深圳市 站内搜索
站内搜索

DCM260B是一款高精度三维电子罗盘,采用美国专利技术的硬磁和软磁校准算法,使罗盘在有磁场干扰的环境中也能通过三维校准方法达得**效果,DCM260B集成三轴磁通门传感器,通过中央处理器实时解算航向,以及使用三轴加速度计对大范围内的倾斜角进行航向补偿,保证罗盘在倾斜角度高达±90°也能提供高精度的航向数据。电子罗盘集成了高精度MCU控制,输出方式多元化,其中标准接口就包括RS232/RS485/TTL等接口,另可接受其它通讯接口的定制。
DCM260B体积小、功耗低、可应用在天线稳固、车辆、系统集成等众多领域,高抗震性、高可靠性也使得罗盘可在极其恶劣的环境下正常工作,更适合于当今的小型化高精度测量集成控制系统.
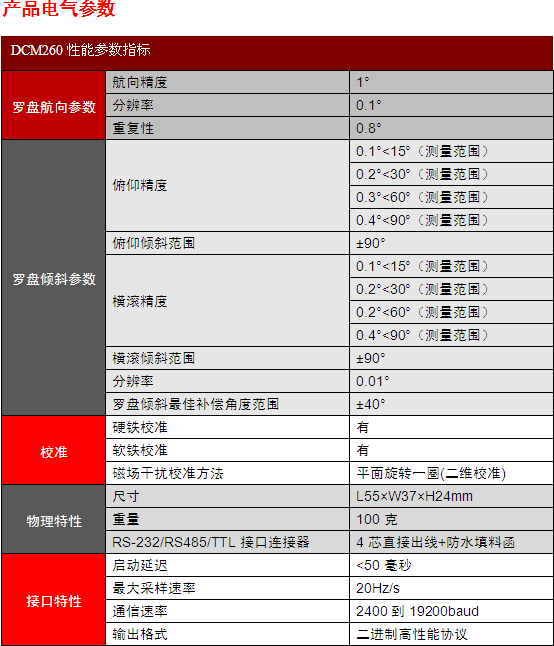
主要特性
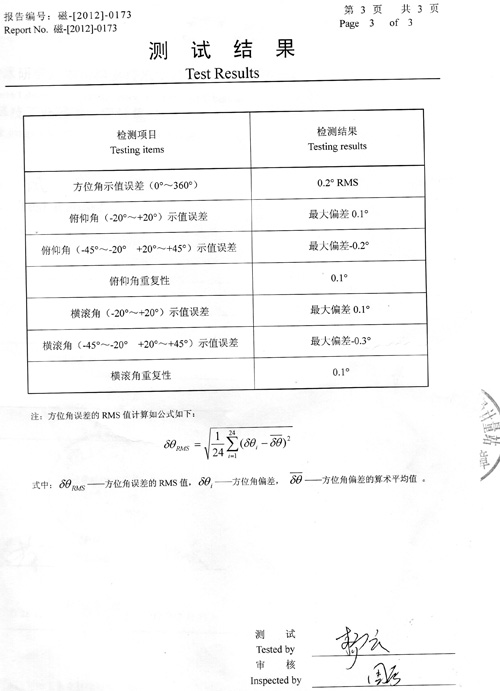
●方位角精度: 0.8° ●倾角测量范围:±90°
●倾角分辨率: 0.01° ●倾角精度: 0.1°
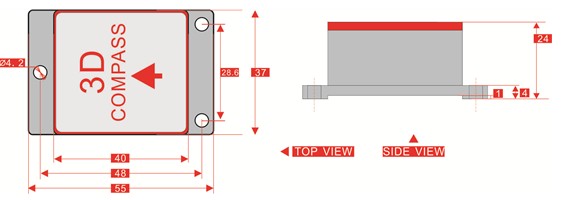
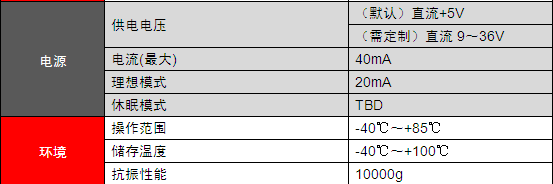
●宽温范围: -40℃~+85℃ ●尺寸: L55×W37×H24mm
●带硬磁、软磁及倾角补偿 ●标准RS232/RS485/TTL输出接口
●DC 5V供电 ●可接受其它功能定制
产品应用
●卫星天线搜星 ●航海导航测绘 ●GPS组合导航 ●天线伺服控制
●火炮发射系统 ●红外成像仪 ●激光测距仪 ●地图补绘器
●ROV水下机器人导航 ●海洋学堪测仪 ●特殊场合机械人 ●无人飞行器

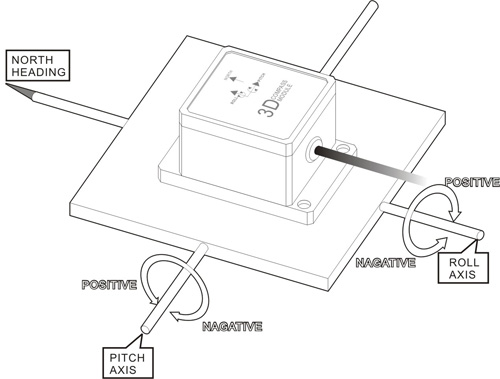
DCM260B测量方向及安装要求
由于DCM260B三维电子罗盘的方位角采用的是地磁原理,所以选择一个最小磁干扰的环境安装位置是至关重要的。请尽可能的远离铁、磁铁、发动机和其它磁物体的放置安装DCM260B。即使周围有这些磁介质,至少需要控制在40CM距离以上(不同的磁场对罗盘干扰的距离不同)。为保证产品达到**测量环境,安装时须采用M3不锈钢螺丝.
尽管DCM260B能够在稳定的磁环境下补偿适中的偏差,但是它不能补偿改变的磁干扰。请特别留意带直流电的电线产生磁场,因为如果直流电改变,磁场大小也将改变。电池也是另一个变化的干扰源。每个安装都是不同的并且用户必须评估在所有可能的操作环境下的安装可行性。
DCM260B的**的航向精度能达到1°,这是经过严格验证不容置疑的,最科学的测试方法同样至关重要。我们建议的测试方法是:将DCM260B电子罗盘安装在垂直竖起的铝(无磁性的其他材料)制杆上,进行航向精度测量(当然转动杆垂直于转动平台,尽量做到避免大的外界磁场干扰)。这样做可以减小罗盘转动的半径,科学的提高测量精度。这只是提供实验室的安装,对于具体情况必须灵活处理。例如:安装在车上时,DCM260B应该做到将其安装在垂直于运动方向。
产品尺寸图